Natural Language Interpretation
DIT411/TIN175, Artificial Intelligence
Peter Ljunglöf
26 January, 2018
Table of contents
What is natural language?
-
Natural language
- Any language that develops naturally in humans through use and repetition
- e.g.: English, Swedish, Runyankole, Kangiryuarmiutun
- Imprecisely defined: is “I totally lol’ed” correct?
- Interpretation can be ambiguous
- Any language that develops naturally in humans through use and repetition
-
Formal language
- Specifically constructed for some purpose, e.g.: Javascript, propositional logic
- Precisely defined
print(1 + 2)✅print(+ 1 2.❌
- Unambiguous, precise semantics
Natural Language Processing (NLP)
-
Some examples of NLP tasks:
- Information retrieval, e.g., web search
- Machine translation, e.g. Google translate
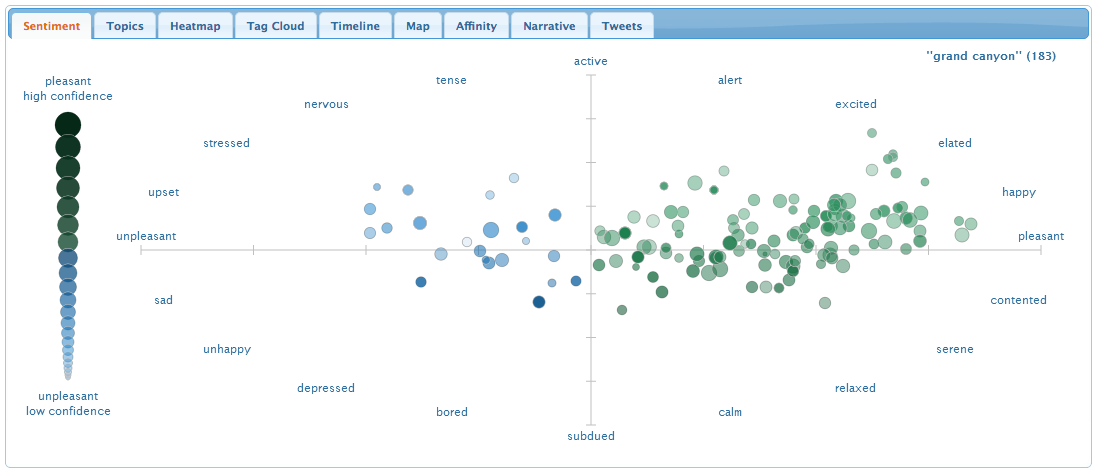
- Classification, e.g. sentiment analysis
- Information extraction, e.g. Named entity recognition
Information retrieval
Machine translation
![]()
Classification
Sentiment analysis
Information extraction
Named entity recognition
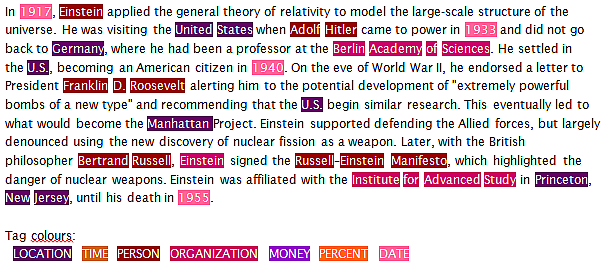
http://www.europeana-newspapers.eu/named-entity-recognition-for-digitised-newspapers
Approaches
-
Rules vs Statistics
- Today many NLP tasks are powered by machine learning
- We have lots of data (corpora), fast processors, cheap storage
- Until the 1990s, most NLP systems were based on complex sets of hand-written rules
-
Does anyone use rule-based systems today?
- Many NLP systems still use hand-written rules
- E.g., domain-specific dialogue systems
- Siri, Alexa, Cortana, …, use both hand-written rules and statistical NLP
- …and not to forget Shrdlite!
Phrase-structure grammars
-
Words have different lexical categories:
- noun, verb, adjective, prepositions, adverbs, …
-
We can combine them into phrasal categories:
- “the” (determiner) + “ball” (noun) = “the ball” (noun phrase)
- “in” (preposition) + “a box” (noun phrase) = “in a box” (prep. phrase)
- “put” (verb) + “the ball” (noun phrase) + “in a box” (prep. phrase)
= “put the ball in a box” (imperative sentence)
-
A grammar is a set of rules that describe which combinations are possible
- “put a ball in a box on the floor” ✅
- “put a ball in a box on the” ❌
Context-free grammars (CFG)
-
A Context-Free Grammar is a 4-tuple \(G = (V, \Sigma, R, S)\) where:
- \(V\) is a finite set of non-terminals (called “syntactic categories”)
- \(\Sigma\) is a finite set of terminals (disjoint from \(V\))
- \(R\) is the set of production rules \(X\rightarrow\beta\),
where \(X\in V\) and \(\beta\in(V \cup \Sigma)^*\) - \(S\in V\) is the start symbol
-
Common syntactic sugar:
-
\(X \rightarrow \alpha \;|\; \beta \;|\; \gamma\) is the same as \(X \rightarrow \alpha\), \(X \rightarrow \beta\), \(X \rightarrow \gamma\)
-
\(X \rightarrow \alpha? \; \beta \; \gamma?\) is the same as \(X \rightarrow \alpha \beta \gamma \;|\; \beta \gamma \;|\; \alpha \beta \;|\; \beta\)
-
Context-free grammar, example
A first attempt at a context-free grammar for Shrdlite:
- Command → take Entity | drop it Location | move Entity Location
- Entity → Quantifier Object | the floor
- Object → Size? Color? Form | Object (that is)? Location
- Location → Relation Entity
- Quantifier → every | a | the | all
- Size → large | small
- Color → red | blue | white | black | …
- Form → box | ball | pyramid | … | boxes | balls | pyramids | …
- Relation → in | beside | under | …
-
This example grammar overgenerates:
- “put every bricks on the floor”
- “put all brick on the floor”
Handling agreement in CFG
-
CFG solution to overgeneration: add more rules
- Entity → QuantifierSG ObjectSG | QuantifierPL ObjectPL | …
- ObjectSG → Size? Color? FormSG | ObjectSG (that is)? Location
- ObjectPL → Size? Color? FormPL | ObjectPL (that are)? Location
- QuantifierSG → every | a | the
- QuantifierPL → all
- FormSG → box | ball | pyramid | …
- FormPL → boxes | balls | pyramids | …
-
This is how we do it in Shrdlite.
Agreement and definite clause grammar
The CFG solution is not feasible for, e.g., German:
- Entity → QuantFemNomSg ObjFemNomSg | QuantMascAckSg ObjMascAckSg | …
- QuantFemNomSg → die
- QuantMascAckSg → den
- ColorFemNomSg → rote | blaue | …
- ColorMascAccSg → roten | blauen | …
German has 2 × 3 × 4 = 24 combinations of Number, Gender and Case.
Definite-Clause Grammars use attributes and unification:
- Entity → Quantifier[\(g,c,n\)] Object[\(g,c,n\)] \(\Longleftarrow\) Note! Only one rule
- Quantifier[fem,nom,sg] → die
- Quantifier[masc,acc,sg] → den
- Color[fem,nom,sg] → rote | blaue | …
- Color[masc,acc,sg] → roten | blauen |
Syntactic analysis (parsing)
-
Problem: Given a grammar, find a derivation from S for an input string
-
Function from string to a list of parse results:
parse(g : Grammar, s : String) : Result[]- 0 results: input is invalid
- 1 result: input is valid and unambiguous
- 2+ results: input is valid and ambiguous
-
Algorithms:
- Parsing can be formulated as a search problem
- CKY algorithm, chart parsing, probabilistic parsing, …
Shrdlite parse results
The Nearley CFG formalism lets you specify how the parse results should look like:
- Command → take Entity { (d) => new TakeCommand(d[1]) }
- Command → drop it Location { (d) => new DropCommand(d[2]) }
- Command → move Entity Location { (d) => new MoveCommand(d[1], d[2]) }
-
“put a green ball beside every large box”
-
\(\Longrightarrow\) MoveCommand(
Entity(“any”, SimpleObject(“ball”, null, “green”)),
Location(“beside”,
Entity(“all”, SimpleObject(“box”, “large”, null))))
Syntactic ambiguity
- “put a ball right of a box in a box beside a table”
- How many syntactic analyses?
- “put (a ball) right of ((a box in a box) beside a table)”
- “put (a ball) right of (a box in (a box beside a table))”
- “put (a ball right of a box) in (a box beside a table)”
- “put ((a ball right of a box) in a box) beside (a table)”
- “put (a ball right of (a box in a box)) beside (a table)”
Levels of ambiguity
-
Most of the sentences we hear seem unambiguous. But almost every utterance contains some kinds of ambiguity. We are just very good at disambiguating!
-
Different levels of ambiguity:
- Lexical: a word can belong to multiple categories
- “Buffalo buffalo buffalo buffalo”
- “Bison [from] Buffalo [often] confuse [other] bison”
- Syntactic: Phrases can attach at different points in the tree
- “I ordered a pizza with rucola”
- “I ordered a pizza with my phone”
- Semantic: Multiple interprations
- “Everyone loves someone”
- \(\forall x\exists y. Love(x,y)\) or \(\exists y\forall x. Love(x,y)\) ?
- Lexical: a word can belong to multiple categories
Why syntax, anyway?
-
So far, I’ve talked about grammars and parse results
- but what do we do with them?
- the parse results themselves are never our final goal
-
The next step is semantics (= interpretation)
- statistical approaces:
- e.g., named entitiy recognition, sentiment analysis, relation extraction
- logical approaches:
- e.g., predicate logic, lambda calculus, modal logic
- statistical approaces:
Semantic representation, the Shrdlite way
-
Shrdlite semantics is propositional logic:
-
a logical description of how we want the final state to look like
- one term for every object in the world:
WhiteBall,BlackBall, …
- one predicate for every relation:
holding(x),inside(x,y),leftof(x,y), …
- logical disjunction and conjunction instead of quantifiers:
P ∨ (Q ∧ R)
- one term for every object in the world:
-
This works because the world is finite!
-
Interpretation, ambiguities
-
Is this ambiguous? “put the white ball in the red box”
-
How about this? “put the ball in the red box”
Shrdlite pipeline
-
This is how Shrdlite goes from text input to a final plan:
- Parsing:
text input → (many) parse results - Interpretation:
parse result + world → (many) goals - (Ambiguity resolution:
many goals → one goal) - Planning:
goal → plan - (Ambiguity resolution:
many plans → one plan)
- Parsing:
Parsing: text input \(\rightarrow{}\) parse results
- function parse(input : string) : ShrdliteResult[]
- (this function is already implemented)
- interface ShrdliteResult {
- input : string
- parse : Command
- interpretation : DNFFormula
- plan : string[] }
- This is already implemented using the Nearley grammar and parser
- after parsing, every
ShrdliteResultcontains
theinputstring and aparseresult - the
interpretationandplanare dummy values
- after parsing, every
Interpretation: parse result + world \(\rightarrow\) goals
- function interpret(parses : ShrdliteResult[], world : WorldState) : ShrdliteResult[]
- (this function is already implemented, but calls interpretCommand)
- class Interpreter {
- interpretCommand(cmd : Command) : CommandSemantics
- interpretEntity(ent : Entity) : EntitySemantics
- interpretLocation(loc : Location) : LocationSemantics
- interpretObject(obj : Object) : ObjectSemantics }
- This is what you have to implement in lab 2!
- the
Interpretermethods should call each other - what should the respective semantics be?
- the
Semantics of commands: Disjunctive Normal Form
DNF = Disjunctive Normal Form = a disjunction of conjunctions of literals
(normal form = all logical formulae can be converted into this form)
- type CommandSemantics = DNFFormula
- class DNFFormula {
- conjuncts : Conjunction[] }
- class Conjunction {
- literals : Literal[] }
- class Literal {
- relation : string
- args : string[] = []
- polarity : boolean = true }
Example: the formula (p(x) ∧ q) ∨ (¬r(y,z)) is created by:
- new DNFFormula([
- new Conjunction([new Literal(“p”, [“x”]), new Literal(“q”)]),
- new Conjunction([new Literal(“r”, [“y”,”z”], false)]) ])
Semantics of Objects, Entities and Locations
-
The semantics of an object description is a collection of
the objects that match the description:- type ObjectSemantics = string[]
- Example: the semantics of “large box” is
["RedBox", "YellowBox"]
-
The semantics of an Entity or a Location is just a wrapper
around the semantics of its children:- type EntitySemantics = {quantifier : string; object : ObjectSemantics}
- type LocationSemantics = {relation : string; entity : EntitySemantics}
- Example: the semantics of “in every large box” is
{relation: "inside", {quantifier: "all", object: ["RedBox", "YellowBox"]}}
Semantic ambiguity
-
DNF inherently captures ambiguity
- “put a ball in a box”
\(\Rightarrow\)
inside(WhiteBall,RedBox) ∨ inside(WhiteBall,YellowBox) ∨ inside(BlackBall,RedBox) ∨ inside(BlackBall,YellowBox) ∨ inside(BlackBall,BlueBox)
- “put a ball in a box”
-
But impossible interperetations should be removed
- Note that we don’t want the interpretation
inside(WhiteBall,BlueBox),
because that violates the physical laws.
- Note that we don’t want the interpretation
Only keep valid interpretations
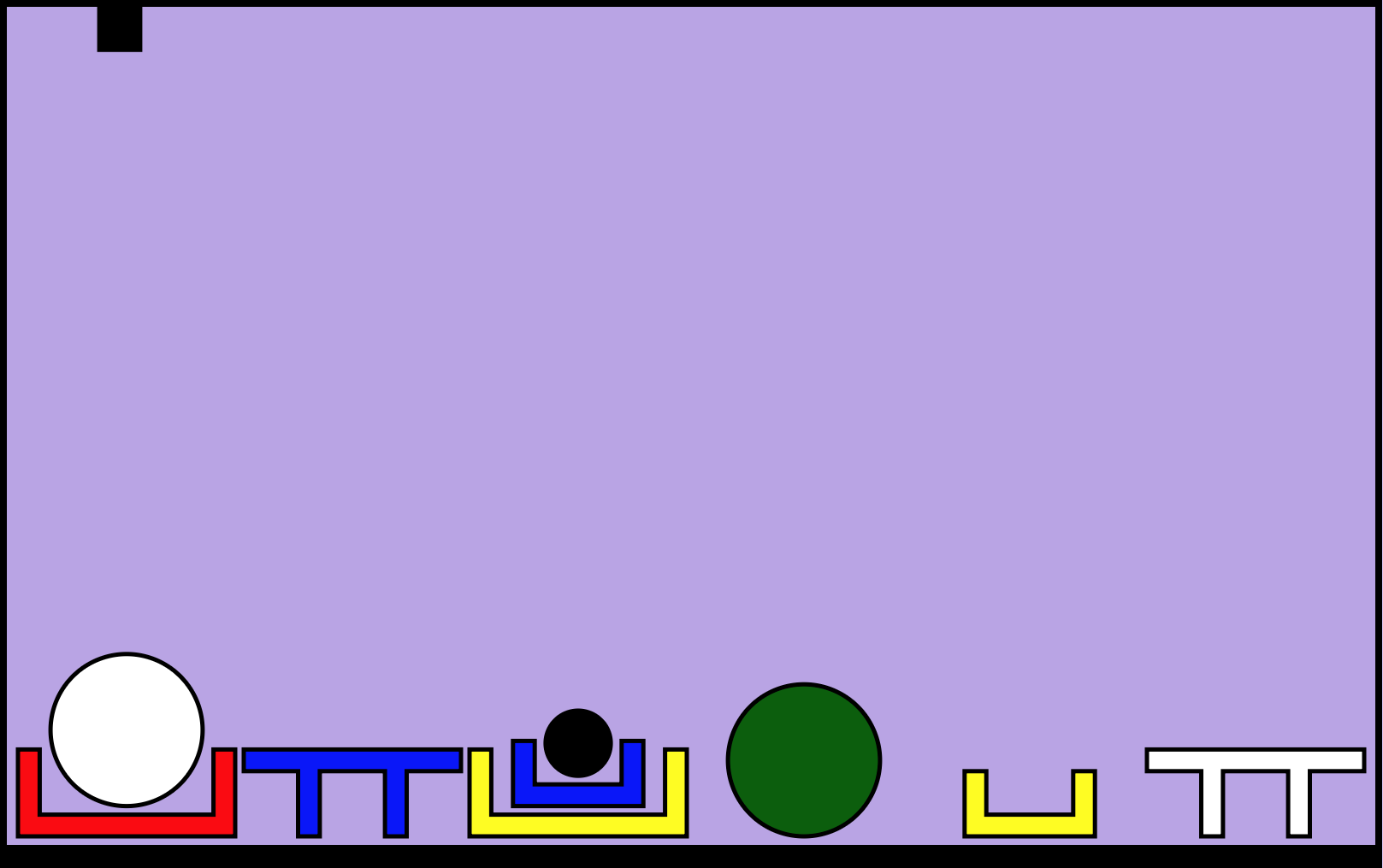
“put the white ball in a box on the floor”
- “put the white ball in a box that is on the floor”
\(\Rightarrow\)
inside(WhiteBall,YellowBox) - “put the white ball that is in a box on the floor” \(\Rightarrow\) There is no white ball in a box
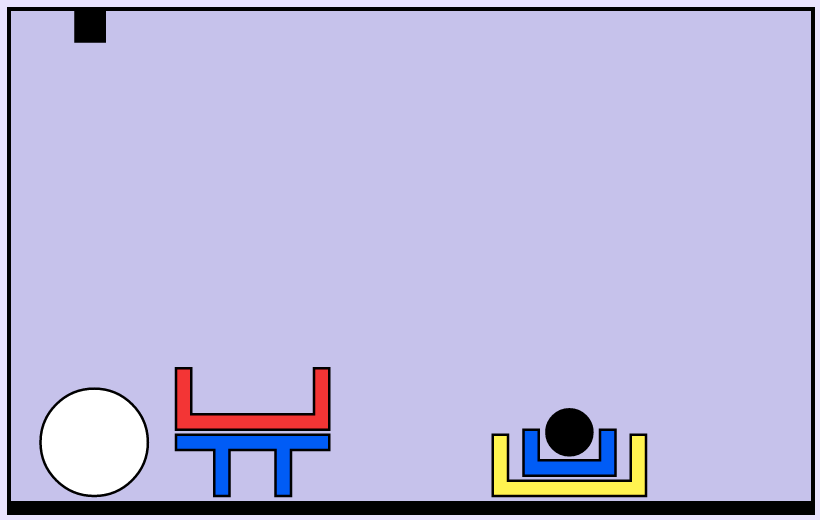
“in a box on the floor”: Natural interpretation
inside(WhiteBall, YellowBox)
The yellow box is already on the floor: 17 actions to complete
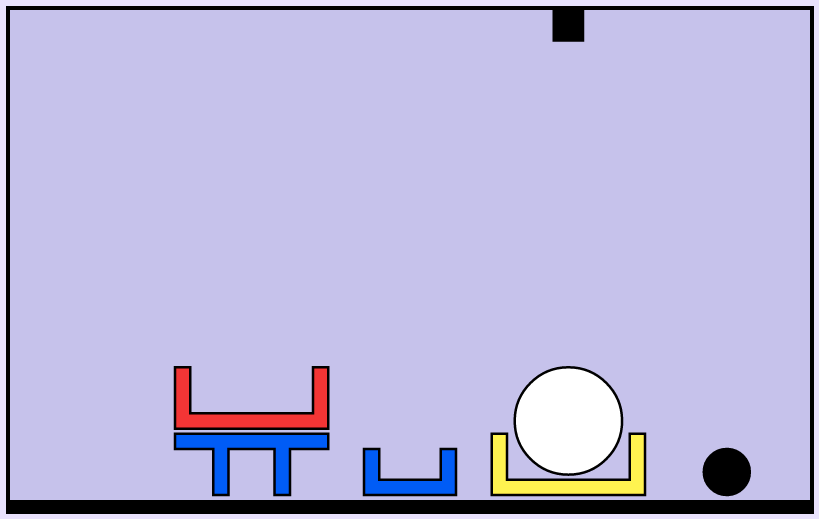
“in a box on the floor”: Alternative interpretation
inside(WhiteBall, RedBox) ∧ on(RedBox, floor)
The red box can be placed on the floor first: 10 actions to complete
- The red box is not on the floor at the start!
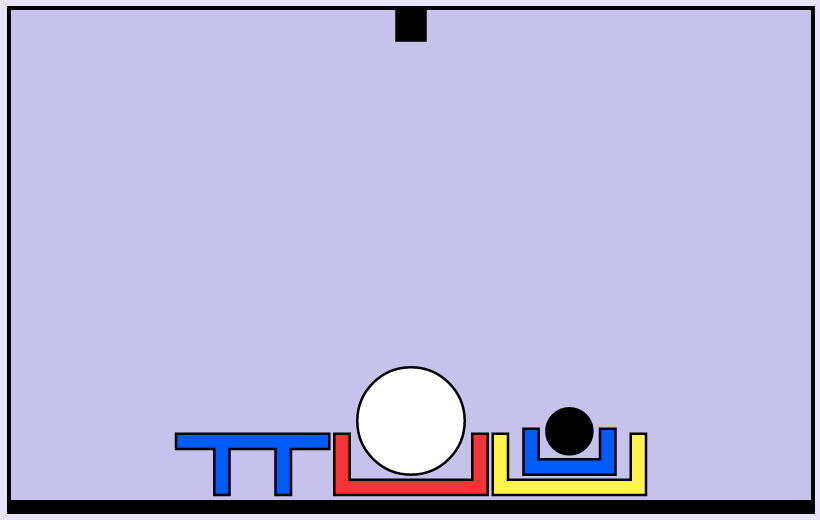
Final interpretation
“put the white ball in a box on the floor”
So, what should the final interpretation be?
inside(WhiteBall, YellowBox)inside(WhiteBall, YellowBox) ∨ (inside(WhiteBall, RedBox) ∧ on(RedBox, floor))
More complex semantic ambiguity
- “put a ball right of a box in a box beside a table”
-
Which object (i.e., which ball) should be placed
where (i.e., beside or in which box, or beside
which table)? -
I.e., what should the goal be for each of
the syntactic analyses? - “put (a ball) right of ((a box in a box) beside a table)”
- “put (a ball) right of (a box in (a box beside a table))”
- “put (a ball right of a box) in (a box beside a table)”
- “put ((a ball right of a box) in a box) beside (a table)”
- “put (a ball right of (a box in a box)) beside (a table)”
Physical laws
-
These are the physical laws that the interpreter and planner must check for:
- The floor can support at most N objects (beside each other).
- All objects must be supported by something.
- The arm can only hold one object at the time.
- The arm can only pick up free objects.
- Objects are “inside” boxes, but “ontop” of other objects.
- Balls must be in boxes or on the floor, otherwise they roll away.
- Balls cannot support anything.
- Small objects cannot support large objects.
- Boxes cannot contain pyramids, planks or boxes of the same size.
- Small boxes cannot be supported by small bricks or pyramids.
- Large boxes cannot be supported by large pyramids.
Interpreter test cases
-
Each test case contains a list of interpretations, each interpretation is a string
(a compact representation of a disjunction of conjunctions)- if one parse gives several interpretations:
-
world: "small", utterance: "take a blue object" interpretations: ["holding(BlueTable) | holding(BlueBox)"]- if several parses give interpretations:
-
world: "small" utterance: "put a black ball in a box on the floor" interpretations: ["inside(BlackBall, YellowBox)", "ontop(BlackBall, floor)"]
Test cases: Conjunctions and invalid utterances
-
- The “all” quantifier gives rise to a conjunction:
-
world: "small" utterance: "put all balls on the floor" interpretations: ["ontop(WhiteBall, floor) & ontop(BlackBall, floor)"]- If an utterance breaks the laws of nature:
-
world: "small" utterance: "put a ball on a table" interpretations: []
Test cases: Missing interpretations
-
- There are some cases where the interpretation is missing:
-
world: "small" utterance: "put a ball in a box on the floor" interpretations: ["COME-UP-WITH-YOUR-OWN-INTERPRETATION"] - You should discuss these cases in your group and come up with
good interpretations!